I'm a Research Scientist at the University of Washington advised by Byron Boots in the Robot Learning Lab. I obtained my Ph.D. from Carnegie Mellon University in 2022, advised by Nathan Michael and working with RISLAB in the Robotics Institute. My thesis work explores dynamical model learning for quadrotors to enable agile and accurate flight. Prior to that, I graduated with a double major in Computer Science (CS) and Electrical and Computer Engineering (ECE) from Cornell University, where I led the software team of CUAUV.
Contact me at alexshpitzer at gmail dot com.
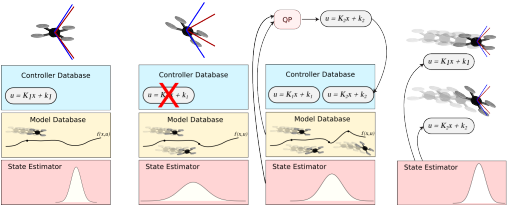
Dynamical Model Learning and Inversion for Aggressive Quadrotor Flight
PDF
Talk
Bibtex

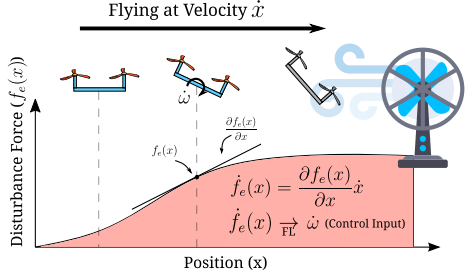
Feedback Linearization for Quadrotors with a Learned Acceleration Error Model
Alexander Spitzer, Nathan Michael
Presented at the IEEE International Conference on Robotics and Automation (ICRA) 2021.
PDF
Video
Bibtex
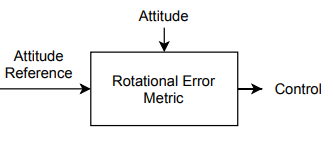
Rotational Error Metrics for Quadrotor Control
Alexander Spitzer, Nathan Michael
Presented at Perception, Learning, and Control for Autonomous Agile Vehicles (IROS 2020 Workshop, Best Workshop Paper Award).
PDF
Talk
Supplement
Bibtex
Inverting Learned Dynamics Models for Aggressive Multirotor Control
Alexander Spitzer, Nathan Michael
Presented at Robotics: Science and Systems (RSS) 2019.
PDF
Poster
Video
Talk
Bibtex

Fast and Agile Vision-Based Flight with Teleoperation and Collision Avoidance on a Multirotor
Alexander Spitzer*, Xuning Yang*, John Yao, Aditya Dhawale, Kshitij Goel, Mosam Dabhi, Matt Collins, Curtis Boirum, Nathan Michael
Presented at the International Symposium on Experimental Robotics (ISER) 2018.
PDF
Video
Bibtex

Leveraging experience for robust, adaptive nonlinear MPC on computationally constrained systems with time-varying state uncertainty
Vishnu R. Desaraju, Alexander Spitzer, Cormac O'Meadhra, Lauren Lieu, Nathan Michael
In The International Journal of Robotics Research, Vol. 37, Issue 13-14, 2018.
PDF
Bibtex

Experience-driven Predictive Control with Robust Constraint Satisfaction under Time-Varying State Uncertainty
Vishnu R. Desaraju, Alexander Spitzer, Nathan Michael
Presented at Robotics: Science and Systems (RSS) 2017.
PDF
Bibtex
BalanceBot: A Self-Balancing Two-Wheeled Robot
Alex Spitzer, Leo Mehr
In Circuit Cellar, Issue 316, pp. 24-31, Nov. 2016.